




































Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Leggi di più
Gekennzeichnet Beiträge

Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!

Neue Desktop-Netzteile Phihong AA90U: 90W und DoE Level VII
Phihong, renommierter Anbieter von zuverlässigen und kostengünstigen Stromversorgungslösungen, hat eine neue Familie...
Leggi di più

Neue programmierbare Cotek-Netzteile mit 1500W: bis zu 400V Ausgangsspannung!
Als Antwort auf die Marktanforderung und das zunehmende Bedürfnis nach Hochspannungsanwendungen hat Cotek sein...
Leggi di più

LIFUD: Neue LED-Treiber DALI DT6 mit NFC-Funktion - Kompakt und effizient!
Wir freuen uns, die Ankunft der neuen dimmbaren LED-Treiber LF-BDD DALI-2 DT6 mit NFC-Funktion auf...
Leggi di più

Adelsystem vervollständigt sein Sortiment mit der neuen DFX-Serie für die DIN-Schiene ⚡
Wir freuen uns, die neue Serie von industriellen Netzteilen Adelsystem DFX vorzustellen, die entwickelt wurden, um...
Leggi di più
Neueste Beiträge
Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Leggi di più
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Neue Desktop-Netzteile Phihong AA90U: 90W und DoE Level VII
Leggi di più
Phihong, renommierter Anbieter von zuverlässigen und kostengünstigen Stromversorgungslösungen, hat eine neue Familie...
Neue programmierbare Cotek-Netzteile mit 1500W: bis zu 400V Ausgangsspannung!
Leggi di più
Als Antwort auf die Marktanforderung und das zunehmende Bedürfnis nach Hochspannungsanwendungen hat Cotek sein...
LIFUD: Neue LED-Treiber DALI DT6 mit NFC-Funktion - Kompakt und effizient!
Leggi di più
Wir freuen uns, die Ankunft der neuen dimmbaren LED-Treiber LF-BDD DALI-2 DT6 mit NFC-Funktion auf...
Adelsystem vervollständigt sein Sortiment mit der neuen DFX-Serie für die DIN-Schiene ⚡
Leggi di più
Wir freuen uns, die neue Serie von industriellen Netzteilen Adelsystem DFX vorzustellen, die entwickelt wurden, um...
Beliebte Beiträge
 Aufladen?")
Was ist PD (Power Delivery) Aufladen?
Das PD "Power Delivery" oder "PD Charger" ist im Grunde genommen ein Schnellladeprotokoll, das sich durch große...
Leggi di più
![Wie man den DC AC Inverter auswählt [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "Wie man den DC AC Inverter auswählt [GUIDA 2023]")
Wie man den DC AC Inverter auswählt [GUIDA 2023]
Wechselrichter: Was ist das? Wozu dient es? Welche Anwendung soll man wählen? Erfahren Sie es mit diesem...
Leggi di più
Einführung in die LED-Beleuchtung [Leitfaden 2021]
Einführung in die LED-Beleuchtungsernährung
Leggi di più
Wie man das Notebook-Netzteil auswählt [Leitfaden 2021]
Finde das perfekte Netzteil für dein Notebook, Tablet, Monitor, Router usw. in zwei einfachen Schritten.
Leggi di più
Wie man die LED-Leiste einstellt [Anleitung 2021]
Folgen Sie unserem Leitfaden, um Ihre maßgeschneiderte LED-Leiste gemäß Ihren Anforderungen optimal zu konfigurieren.
Leggi di più
![Wofür wird der CAN-Bus in Netzteilen verwendet? [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "Wofür wird der CAN-Bus in Netzteilen verwendet? [GUIDA 2023]")

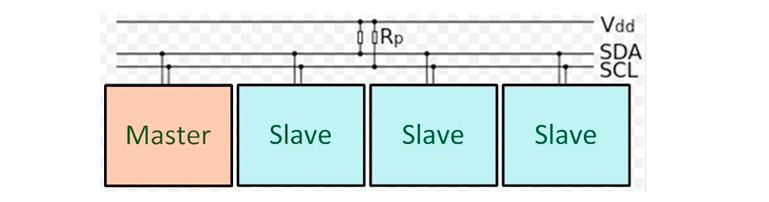 Schema eines PMBUs
Schema eines PMBUs Schema eines CAN-Bus
Schema eines CAN-Bus  Nationales Synchrotronstrahlungsforschungszentrum - CANBus
Nationales Synchrotronstrahlungsforschungszentrum - CANBus