





































Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Leggi di più
Featured posts

Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!

Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Leggi di più

Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Leggi di più

Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Leggi di più

Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Leggi di più
Latest posts
Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!
Leggi di più
Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Leggi di più
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Leggi di più
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Leggi di più
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Leggi di più
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Popular posts
 Charging?")
What is PD (Power Delivery) Charging?
The PD "Power Delivery" or "PD Charger" is essentially a fast charging protocol that relies on great functionality...
Leggi di più
![How to choose the DC AC Inverter [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "How to choose the DC AC Inverter [GUIDA 2023]")
How to choose the DC AC Inverter [GUIDA 2023]
Inverter: what is it? What is it for? Which application to choose? Find out with this Selection Guide.
Leggi di più
How to choose the Notebook Power Supply [Guide 2021]
Find the perfect Power Supply for your Notebook, Tablet, Monitor, Router, etc. in two simple steps.
Leggi di più
How to set up the LED Bar [Guide 2021]
Follow our Guide to set up your Custom LED Bars according to your needs
Leggi di più
![What is the purpose of the CAN bus in power supplies? [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "What is the purpose of the CAN bus in power supplies? [GUIDA 2023]")

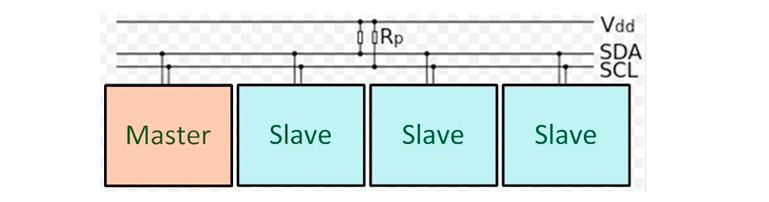 Diagram of a PMBus
Diagram of a PMBus Diagram of a CAN bus
Diagram of a CAN bus  National Synchrotron Radiation Research Center - CANBus
National Synchrotron Radiation Research Center - CANBus