




































Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Leggi di più
Entradas de blog destacadas

Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!

Nuevos Alimentadores de Escritorio Phihong AA90U: 90W y DoE Nivel VII
Phihong, renombrado proveedor de soluciones de alimentación fiables y económicas, ha introducido una nueva familia de...
Leggi di più

¡Nuevas fuentes de alimentación programables Cotek de 1500W: hasta 400V de salida!
En respuesta a la demanda del mercado y a la creciente necesidad de aplicaciones de alta tensión, Cotek ha ampliado...
Leggi di più

LIFUD: ¡Nuevos drivers LED DALI DT6 con función NFC - Compactos y eficientes!
Nos complace anunciar la llegada de los nuevos drivers LED regulables LF-BDD DALI-2 DT6 con función NFC, disponibles...
Leggi di più

Adelsystem completa la gama con la nueva serie DFX para guía DIN ⚡
Nos complace presentar la nueva serie de fuentes de alimentación industriales Adelsystem DFX, diseñadas para...
Leggi di più
Últimas entradas del blog
Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Leggi di più
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Nuevos Alimentadores de Escritorio Phihong AA90U: 90W y DoE Nivel VII
Leggi di più
Phihong, renombrado proveedor de soluciones de alimentación fiables y económicas, ha introducido una nueva familia de...
¡Nuevas fuentes de alimentación programables Cotek de 1500W: hasta 400V de salida!
Leggi di più
En respuesta a la demanda del mercado y a la creciente necesidad de aplicaciones de alta tensión, Cotek ha ampliado...
LIFUD: ¡Nuevos drivers LED DALI DT6 con función NFC - Compactos y eficientes!
Leggi di più
Nos complace anunciar la llegada de los nuevos drivers LED regulables LF-BDD DALI-2 DT6 con función NFC, disponibles...
Adelsystem completa la gama con la nueva serie DFX para guía DIN ⚡
Leggi di più
Nos complace presentar la nueva serie de fuentes de alimentación industriales Adelsystem DFX, diseñadas para...
Entradas de blog populares
?")
¿Qué es la Carga PD (Power Delivery)?
La carga PD “Power Delivery” o “PD Charger” es fundamentalmente un protocolo de carga rápida que se vale de gran...
Leggi di più
![Cómo elegir el Inversor DC AC [GUÍA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "Cómo elegir el Inversor DC AC [GUÍA 2023]")
Cómo elegir el Inversor DC AC [GUÍA 2023]
Inversor: ¿Qué es? ¿Para qué sirve? ¿Qué aplicación elegir? Descúbrelo con esta Guía de Elección.
Leggi di più
Introducción a la Alimentación LED [Guida 2021]
Introducción a la Alimentación de Productos de Iluminación LED
Leggi di più
Cómo elegir el Cargador para Portátil [Guía 2021]
Encuentra el Alimentador perfecto para tu Portátil, Tablet, Monitor Router, etc. en dos sencillos pasos
Leggi di più
Cómo configurar la Barra LED [Guía 2021]
Sigue nuestra guía para configurar de la mejor manera tu Barras LED a medida según tus necesidades
Leggi di più
![¿Para qué sirve el CAN bus en las fuentes de alimentación? [GUÍA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "¿Para qué sirve el CAN bus en las fuentes de alimentación? [GUÍA 2023]")

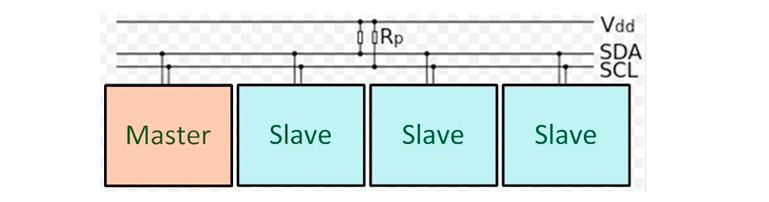 Esquema de un PMBUs
Esquema de un PMBUs Esquema de un bus CAN
Esquema de un bus CAN 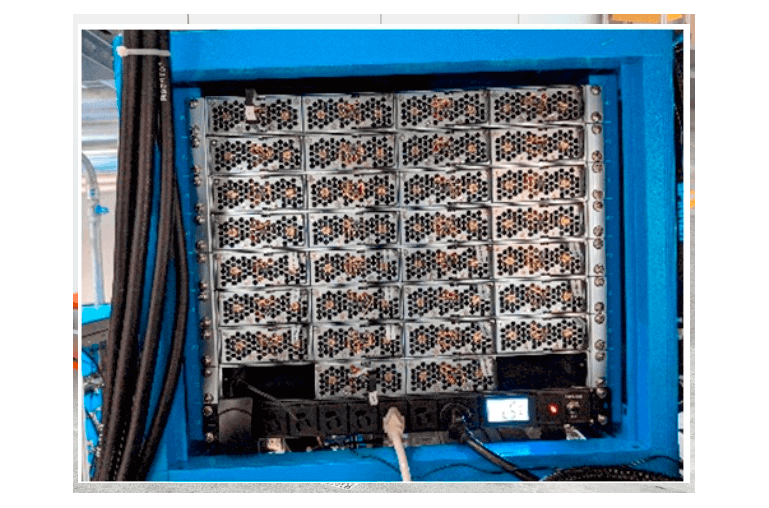 Centro Nacional de Investigación de Radiación Sincrotrón - CANBus
Centro Nacional de Investigación de Radiación Sincrotrón - CANBus