




































Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Leggi di più
Articles en vedette

Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi

Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Leggi di più

Nouveaux Alimentations de Bureau Phihong AA90U : 90W et DoE Niveau VII
Phihong, fournisseur renommé de solutions d'alimentation fiables et économiques, a introduit une nouvelle gamme...
Leggi di più

Nouveaux blocs d'alimentation programmables Cotek de 1500W : jusqu'à 400V en sortie !
En réponse à la demande du marché et à la nécessité croissante d'applications à haute tension, Cotek a élargi sa...
Leggi di più

LIFUD: nouveaux pilotes LED DALI DT6 avec fonction NFC - Compacts et efficaces!
Nous sommes ravis d'annoncer l'arrivée des nouveaux drivers LED dimmables LF-BDD DALI-2 DT6 avec fonction NFC,...
Leggi di più
Derniers articles
Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Leggi di più
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Mean Well: centinaia di prodotti a catalogo su Alimentatorishop!
Leggi di più
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Nouveaux Alimentations de Bureau Phihong AA90U : 90W et DoE Niveau VII
Leggi di più
Phihong, fournisseur renommé de solutions d'alimentation fiables et économiques, a introduit une nouvelle gamme...
Nouveaux blocs d'alimentation programmables Cotek de 1500W : jusqu'à 400V en sortie !
Leggi di più
En réponse à la demande du marché et à la nécessité croissante d'applications à haute tension, Cotek a élargi sa...
LIFUD: nouveaux pilotes LED DALI DT6 avec fonction NFC - Compacts et efficaces!
Leggi di più
Nous sommes ravis d'annoncer l'arrivée des nouveaux drivers LED dimmables LF-BDD DALI-2 DT6 avec fonction NFC,...
Articles populaires
 ?")
Qu'est-ce que la Recharge PD (Power Delivery) ?
La recharge PD "Power Delivery" ou "PD Charger" est essentiellement un protocole de recharge rapide qui bénéficie de...
Leggi di più
![Comment choisir l'Inverter DC AC [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "Comment choisir l'Inverter DC AC [GUIDA 2023]")
Comment choisir l'Inverter DC AC [GUIDA 2023]
Inverseur: qu'est-ce que c'est? A quoi ça sert? Quelle application choisir? Découvrez-le avec ce Guide de Choix.
Leggi di più
Introduction à l'Alimentation LED [Guida 2021]
Introduction à l'Alimentation des Produits d'Éclairage LED
Leggi di più
Comment choisir l'Alimentation Notebook [Guida 2021]
Trouvez l'Alimentation parfaite pour votre Notebook, Tablette, Moniteur, Routeur, etc. en deux étapes simples
Leggi di più
Comment configurer la Barre LED [Guida 2021]
Suivez notre guide pour configurer au mieux votre Barres LED sur mesure selon vos besoins
Leggi di più
![À quoi sert le CAN bus dans les alimentations ? [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "À quoi sert le CAN bus dans les alimentations ? [GUIDA 2023]")

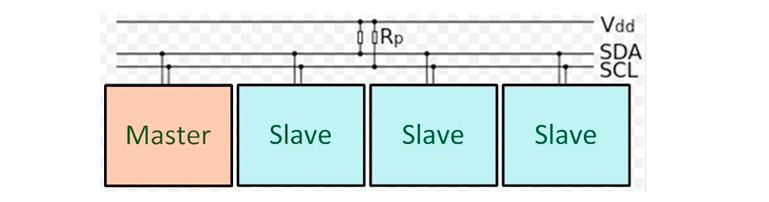 Schéma d'un PMBUs
Schéma d'un PMBUs Schéma d'un bus CAN
Schéma d'un bus CAN  Centre National de Recherche sur le Rayonnement Synchrotron - CANBus
Centre National de Recherche sur le Rayonnement Synchrotron - CANBus