





































MEAN WELL continua a innovare nel settore dell’illuminazione intelligente con il lancio della serie XLC-25/40/60KN,...
Leggi di più
Articles en vedette

XLC-25/40/60KN: la nuova generazione di driver LED KNX di MEAN WELL

Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!
Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Leggi di più

Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Leggi di più

Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Leggi di più

Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Leggi di più
Derniers articles
XLC-25/40/60KN: la nuova generazione di driver LED KNX di MEAN WELL
Leggi di più
MEAN WELL continua a innovare nel settore dell’illuminazione intelligente con il lancio della serie XLC-25/40/60KN,...
Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!
Leggi di più
Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Leggi di più
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Leggi di più
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Leggi di più
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Articles populaires
 ?")
Qu'est-ce que la Recharge PD (Power Delivery) ?
La recharge PD "Power Delivery" ou "PD Charger" est essentiellement un protocole de recharge rapide qui bénéficie de...
Leggi di più
![Comment choisir l'Inverter DC AC [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "Comment choisir l'Inverter DC AC [GUIDA 2023]")
Comment choisir l'Inverter DC AC [GUIDA 2023]
Inverseur: qu'est-ce que c'est? A quoi ça sert? Quelle application choisir? Découvrez-le avec ce Guide de Choix.
Leggi di più
Comment choisir l'Alimentation Notebook [Guida 2021]
Trouvez l'Alimentation parfaite pour votre Notebook, Tablette, Moniteur, Routeur, etc. en deux étapes simples
Leggi di più
Introduction à l'Alimentation LED [Guida 2021]
Introduction à l'Alimentation des Produits d'Éclairage LED
Leggi di più
Comment configurer la Barre LED [Guida 2021]
Suivez notre guide pour configurer au mieux votre Barres LED sur mesure selon vos besoins
Leggi di più
![À quoi sert le CAN bus dans les alimentations ? [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "À quoi sert le CAN bus dans les alimentations ? [GUIDA 2023]")

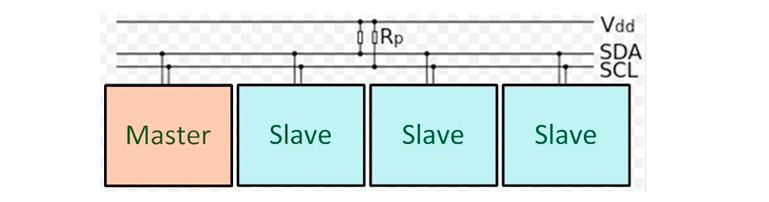 Schéma d'un PMBUs
Schéma d'un PMBUs Schéma d'un bus CAN
Schéma d'un bus CAN  Centre National de Recherche sur le Rayonnement Synchrotron - CANBus
Centre National de Recherche sur le Rayonnement Synchrotron - CANBus