





































Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Leggi di più
Post presentato

Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!

Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Leggi di più

Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Leggi di più

Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Leggi di più

Scopri Mean Well su Alimentatorishop: centinaia di prodotti a stock!
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Leggi di più
Ultimi post
Lifud CASAMBI: L’Innovazione nel Controllo Wireless per LED!
Leggi di più
Lifud presenta la serie CASAMBI ACB-B, una soluzione avanzata per il controllo wireless dell’illuminazione, perfetta...
Nuovo CBI2501224A di Adelsystem: più compatto, più potente
Leggi di più
Nel mondo dell’alimentazione industriale, l’ottimizzazione dello spazio e l’affidabilità dei dispositivi sono...
Nuovo Driver LED Lifud a tensione costante - DALI DT8 + DMX RGBW
Leggi di più
Siamo lieti di annunciare l'arrivo del nuovo modello Lifud LF-GBD150-6250-24, il driver LED di ultima generazione...
Nuovi In Track LED Driver di Lifud: Soluzioni Compatte per Illuminare Grandi Spazi
Leggi di più
Nel mondo dell'illuminazione professionale, Lifud continua a distinguersi per l'innovazione e l'affidabilità. I nuovi...
Scopri Mean Well su Alimentatorishop: centinaia di prodotti a stock!
Leggi di più
Siamo lieti di aggiornarvi sulle novità riguardanti il marchio MEAN WELL, già leader globale nel settore degli...
Post popolari
?")
Cos'è la Ricarica PD (Power Delivery)?
La ricarica PD “Power Delivery” o “PD Charger” è fondamentalmente un protocollo di ricarica veloce che si avvale di...
Leggi di più
![Come scegliere l'Inverter DC AC [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/thumb/MINIATURA-NEWS.jpg "Come scegliere l'Inverter DC AC [GUIDA 2023]")
Come scegliere l'Inverter DC AC [GUIDA 2023]
Inverter: cos'è? A cosa serve? Quale applicazione scegliere? Scoprilo con questa Guida alla Scelta.
Leggi di più
Come scegliere l'Alimentatore Notebook [Guida 2021]
Trova l'Alimentatore perfetto per il tuo Notebook, Tablet, Monitor Router, etc. in due semplici passaggi
Leggi di più
Introduzione all'Alimentazione LED [Guida 2021]
Introduzione all'Alimentazione di Prodotti di Illuminazione a LED
Leggi di più
Come configurare la Barra LED [Guida 2021]
Segui la nostra Guida per configurare al meglio la tua Barre a LED su misura a seconda delle tue esigenze
Leggi di più
![A cosa serve il CAN bus negli alimentatori? [GUIDA 2023]](https://www.alimentatorishop.com/img/ybc_blog/post/1-BANNER-NEWS.png "A cosa serve il CAN bus negli alimentatori? [GUIDA 2023]")

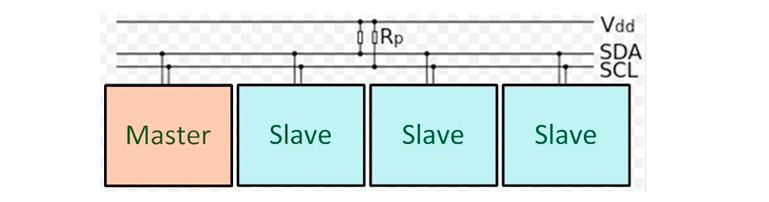 Schema di un PMBUs
Schema di un PMBUs Schema di un CAN bus
Schema di un CAN bus  National Synchrotron Radiation Research Center - CANBus
National Synchrotron Radiation Research Center - CANBus